MODULARES I/O-SYSTEM
C6 Remote I/O
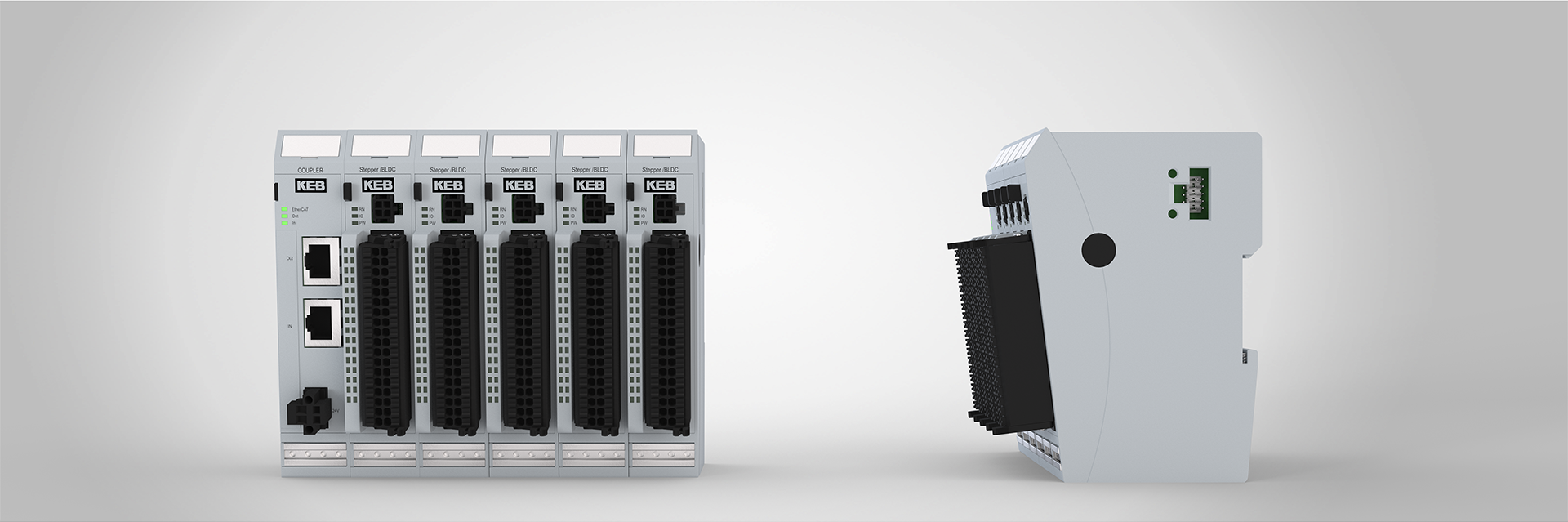
Das C6 Remote I/O-System von KEB bietet verschiedene Möglichkeiten für den Anschluss der Prozesssignale in einem EtherCAT-Netzwerk. Es besteht aus dem C6 Remote I/O-Buskoppler sowie weiteren I/O-Modultypen. Im C6 Remote I/O-Buskoppler erfolgt die Wandlung der Übertragungsphysik und die Erzeugung der Systemspannungen für die Module. Dabei bleibt das EtherCAT-Protokoll durchgängig bis ins letzte I/O-Modul erhalten: Die Module arbeiten im System jeweils als eigenständiger EtherCAT-Slave. Wie jeder EtherCAT-Slave können sie als Teilnehmer individuell konfiguriert werden. Darüber hinaus stehen die Daten ohne Verzögerung im EtherCAT zur Verfügung und müssen nicht von einem proprietären Bus umgewandelt werden. Am Ende des modularen Gerätes wird die Verbindung von Hin- und Rückleitung automatisch geschlossen, sodass am zweiten Port des Buskopplers oder Extenders das nächste EtherCAT-Gerät angeschlossen werden kann.
Mit einer Breite von nur 25 mm erfüllt das steckbare System eine hohe Packungsdichte. Durch die vielfältigen Möglichkeiten der Module und der Durchgängigkeit des EtherCAT-Feldbusses lassen sich unterschiedlichste applikationsspezifische Topologien realisieren.

Highlights
- Durchgängiges EtherCAT I/O-System in Echtzeit
- Kompakte Bauweise (32 DI auf 25 mm)
- Umfangreiche Auswahl an I/O-Modul-Typen
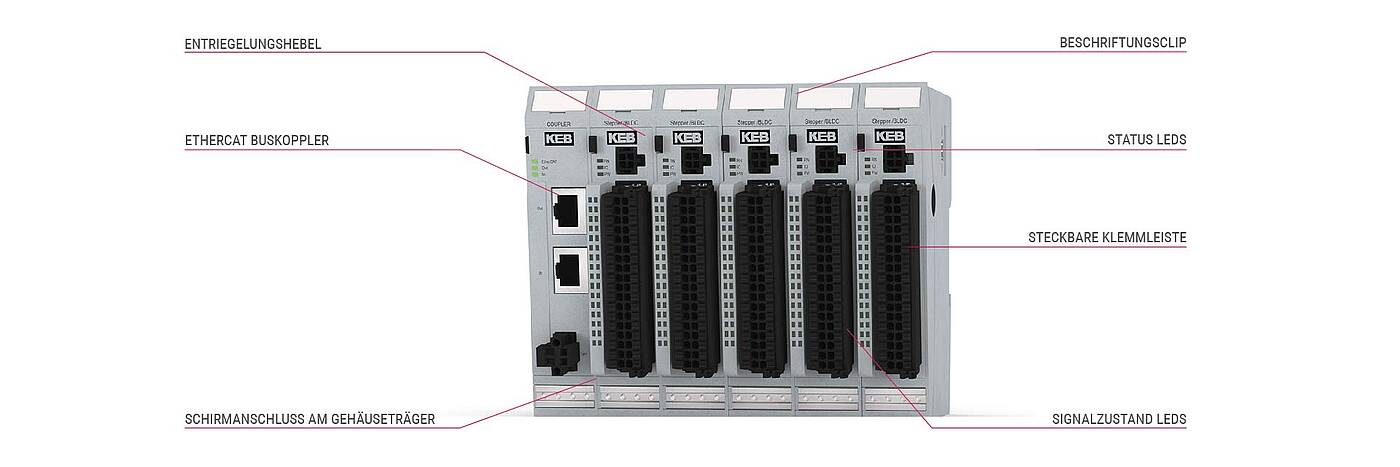
- Steckbare Klemmen und Module
SIE HABEN FRAGEN? WIR HELFEN IHNEN GERNE WEITER!
Nutzen Sie dafür einfach unser Kontaktformular.
Jetzt Kontakt aufnehmenC6 I/O Module
Allgemeine technische Daten
| Feldbus | EtherCAT 100 Mbits/s |
|---|---|
| B x H x T | 25 x 120 x 90 mm |
| Montage | 35 mm DIN Hutschiene |
| Controller | ET 1100 |
| Anschluss E-Bus | 10-poliger Systemstecker in Seitenwand |
| Endmodul | nicht notwendig |
| Spannungsversorgung | 24 V DC (-20 % … +25 %) |
| Potentialtrennung | Module untereinander gegen den Bus |
| Betriebstemperatur | 0 … +55 °C |
| Lagertemperatur | -25 … +70 °C |
| Relative Luftfeuchte | 5 … 95 %, ohne Betauung |
| Schutzart | IP 20 |
| Störfestigkeit | Zone B nach EN 61131-2 |
Modulspezifische technische Daten
Bus Coupler
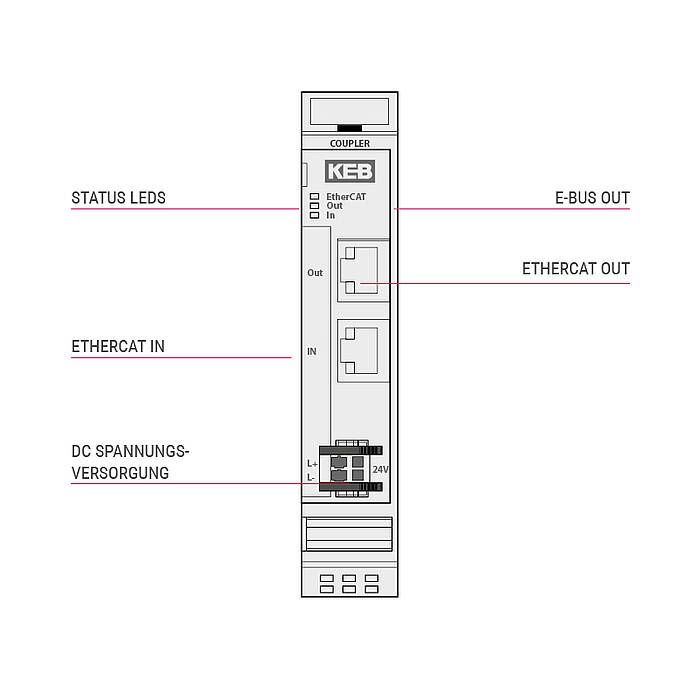
| Feldbus | EtherCAT 100 Mbits/s |
| Spannungsversorgung | 24 V DC (-20 % … +25 %) |
| Versorgung E-Bus | max. 3 A (ca. 20 Module) |
| Kabellänge | max. 100 m zwischen 2 Buskopplern |
| Anschluss | 2 x RJ45 |
| Eingangsstrom | 50 mA & E-Bus Versorgung |
| Feldbus | EtherCAT 100 Mbits/s |
| Spannungsversorgung | 24 V DC (-20 % … +25 %) |
| Versorgung E-Bus | max. 2 A (ca. 11 Module) |
| Digitale Eingänge | 16 |
| Eingangsverzögerung | 3 ms |
| Signalpegel | Aus -3 … 5 V Ein 15 … 30 V |
| Digitale Ausgänge | 16 |
| max. Strom | 0,5 A je Ausgang |
| Summenstrom | max. 8 A |
| Last E-Bus | 135 mA |
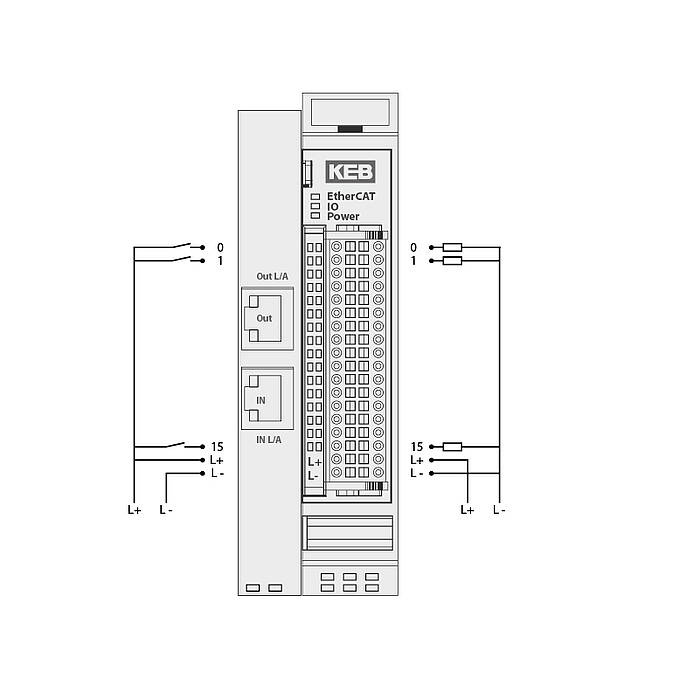
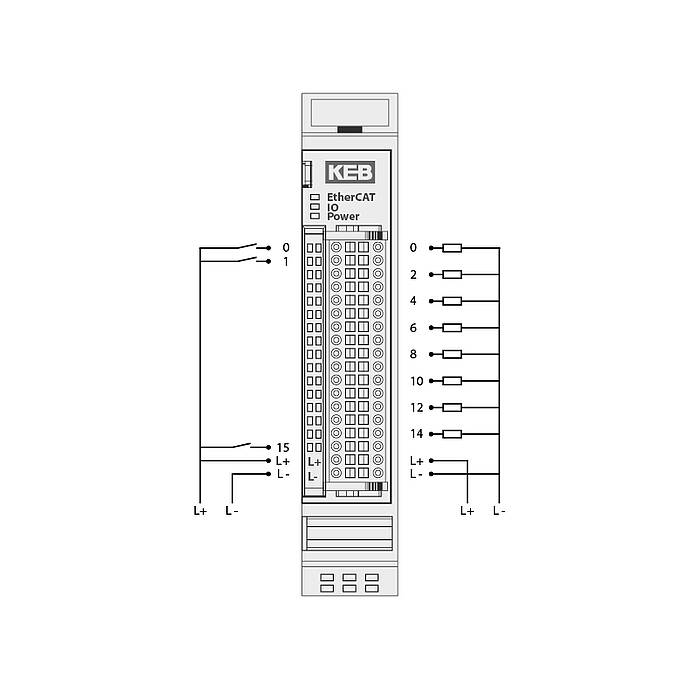
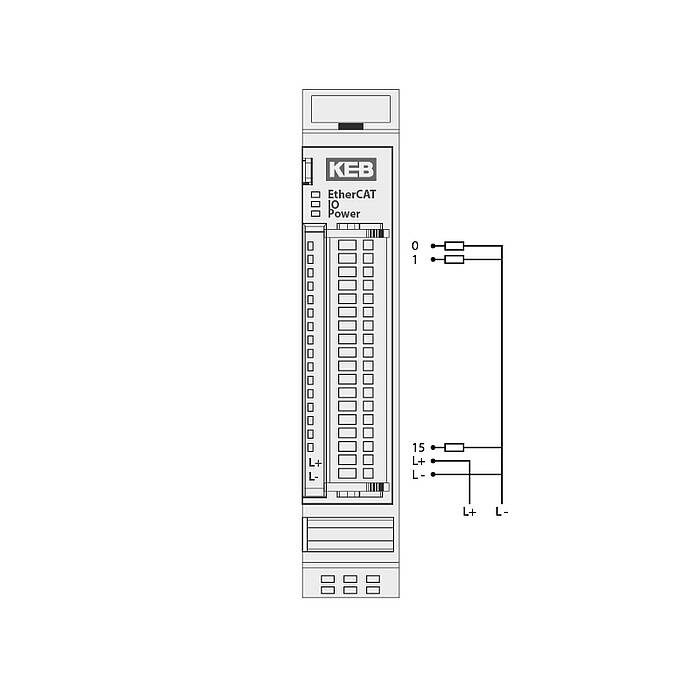
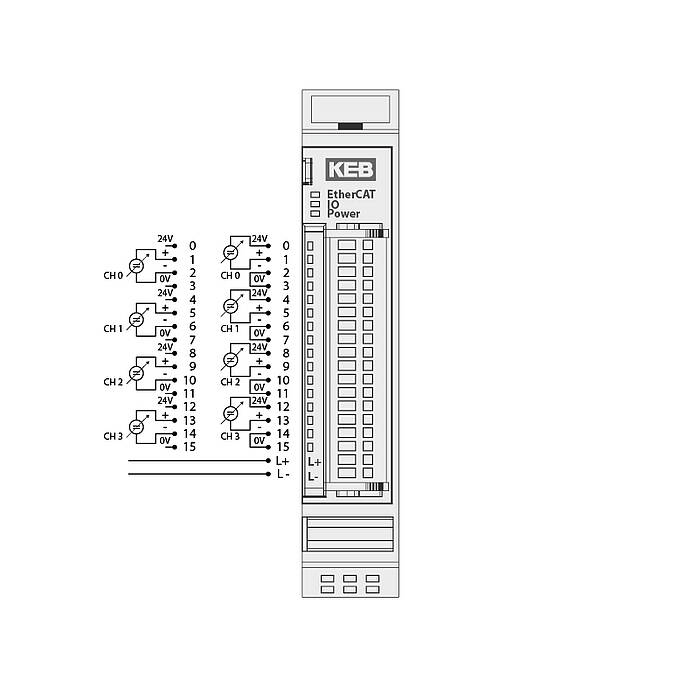
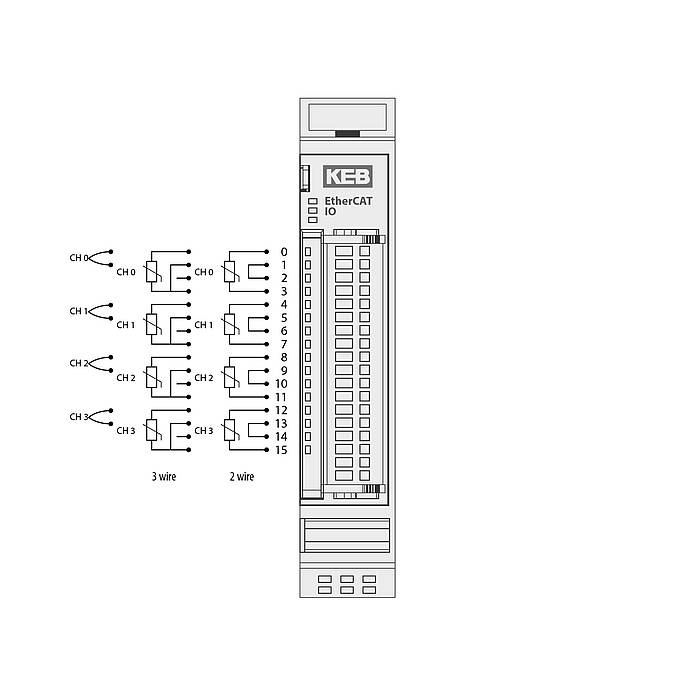
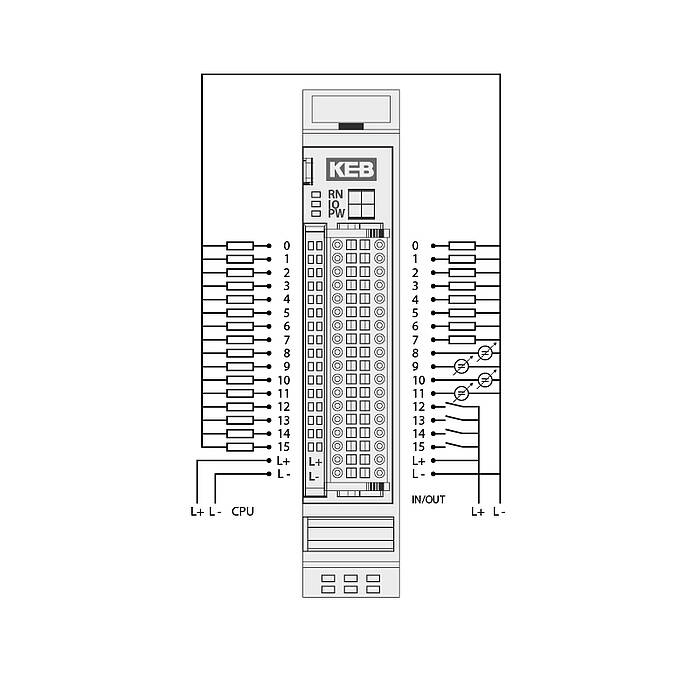
Digitale Ein-/Ausgänge
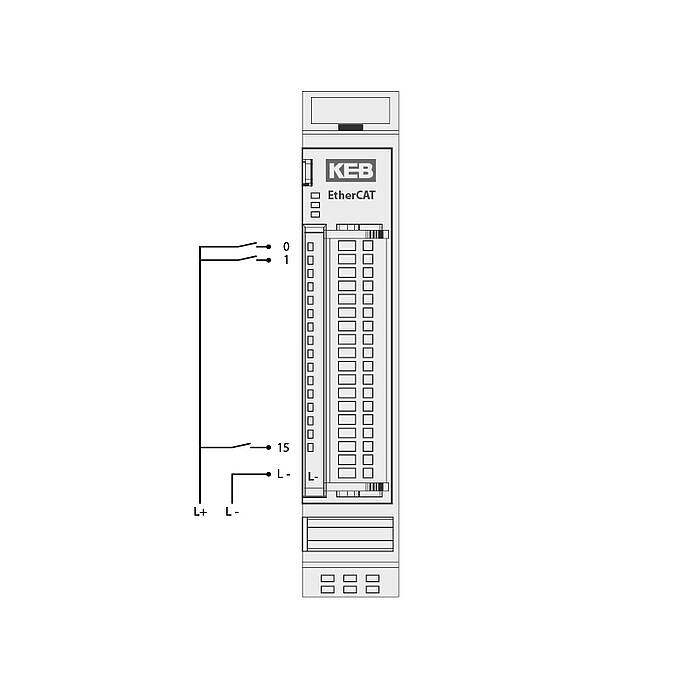
| Digitale Eingänge | 16 |
| Eingangsverzögerung | 1 ms |
| Signalpegel | Aus -3 … 5 V Ein 15 … 30 V |
| Digitale Ausgänge | – |
| max. Strom | – |
| Summenstrom | – |
| Last E-Bus | 100 mA |
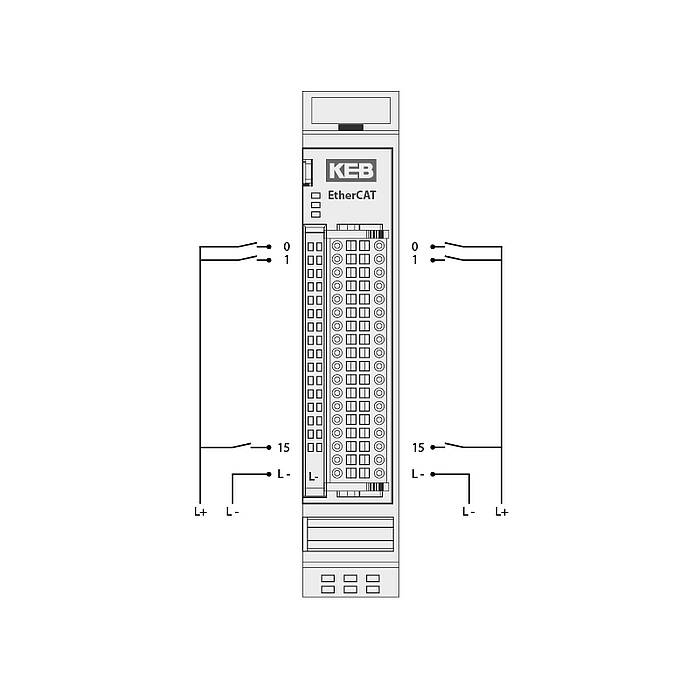
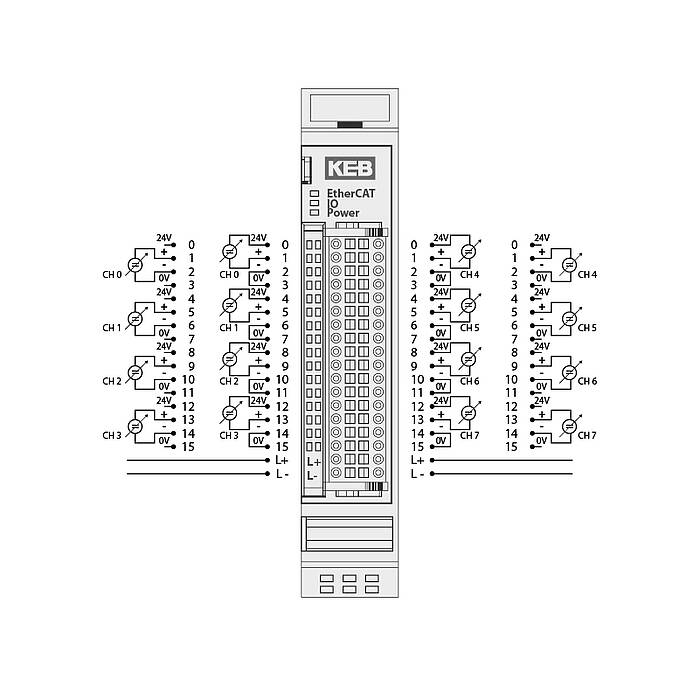
| Digitale Eingänge | 32 |
| Eingangsverzögerung | 1 ms |
| Signalpegel | Aus -3 … 5 V Ein 15 … 30 V |
| Digitale Ausgänge | – |
| max. Strom | – |
| Summenstrom | – |
| Last E-Bus | 85 mA |
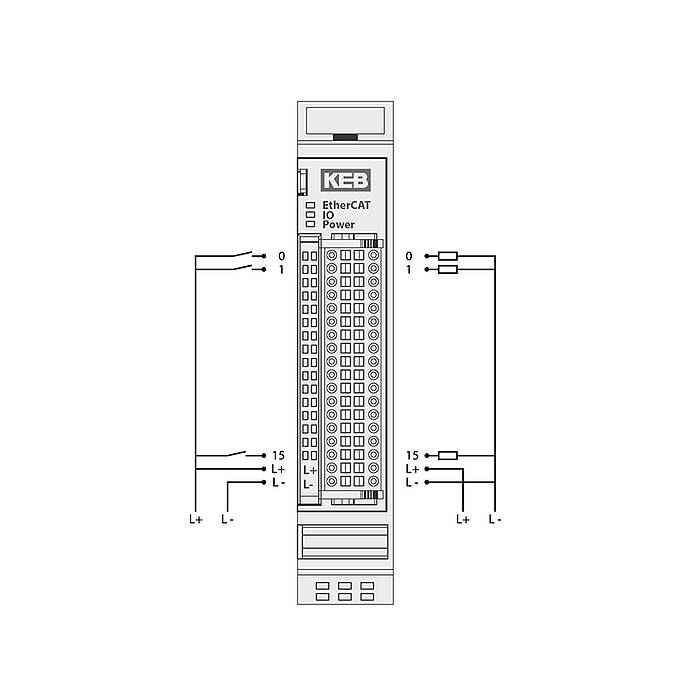
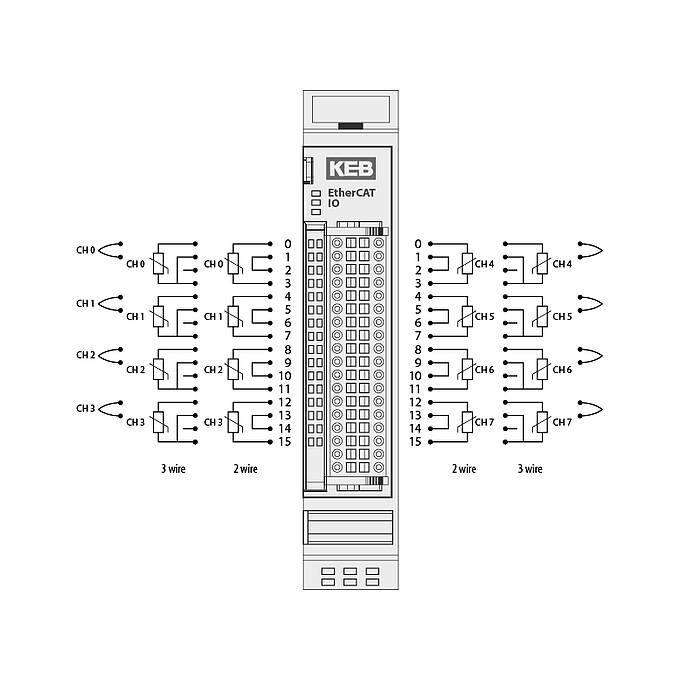
| Digitale Eingänge | 16 |
| Eingangsverzögerung | 1 ms |
| Signalpegel | Aus -3 … 5 V Ein 15 … 30 V |
| Digitale Ausgänge | 16 |
| max. Strom | 0,5 A je Ausgang |
| Summenstrom | max. 8 A |
| Last E-Bus | 135 mA |
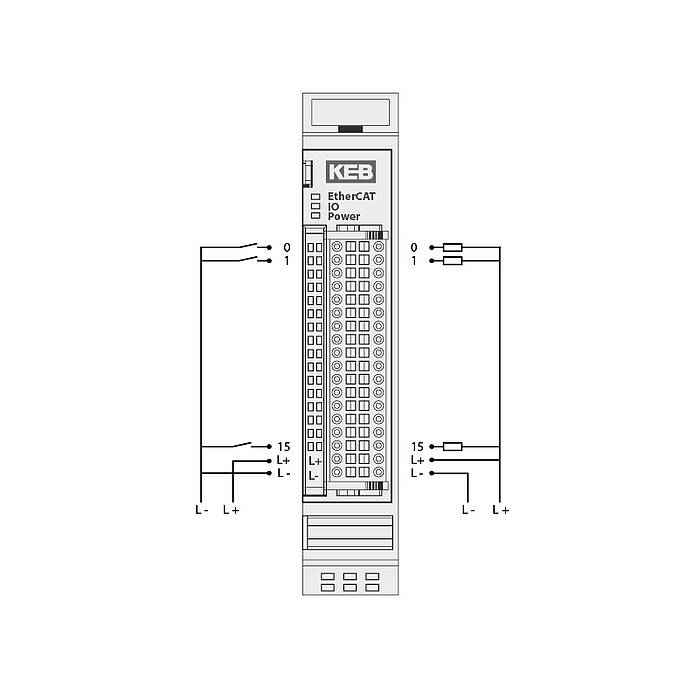
| Digitale Eingänge | 16 |
| Eingangsverzögerung | 1 ms |
| Signalpegel | Aus 15 … 30 V Ein -3 … 5 V |
| Digitale Ausgänge | 16 |
| max. Strom | 0,5 A je Ausgang |
| Summenstrom | max. 8 A |
| Last E-Bus | 135 mA |
| Digitale Eingänge | 16 |
| Eingangsverzögerung | 1 ms |
| Signalpegel | Aus -3 … 5 V Ein 15 … 30 V |
| Digitale Ausgänge | 8 |
| max. Strom | 1 A je Ausgang |
| Summenstrom | max. 8 A |
| Last E-Bus | 135 mA |
| Digitale Eingänge | – |
| Ausgangsverzögerung | – |
| Signalpegel | – |
| Digitale Ausgänge | 16 |
| max. Strom | 0,5 A je Ausgang |
| Summenstrom | max. 8 A |
| Last E-Bus | 130 mA |

| Digitale Eingänge | – |
| Ausgangsverzögerung | – |
| Signalpegel | – |
| Digitale Ausgänge | 8 |
| max. Strom | 1 A je Ausgang |
| Summenstrom | max. 8 A |
| Last E-Bus | 130 mA |
| Digitale Eingänge | – |
| Ausgangsverzögerung | – |
| Signalpegel | – |
| Digitale Ausgänge | 8 |
| max. Strom | 2 A je Ausgang |
| Summenstrom | max. 10 A |
| Last E-Bus | 130 mA |

| Digitale Eingänge | – |
| Ausgangsverzögerung | – |
| Signalpegel | – |
| Digitale Ausgänge | 8 |
| max. Strom | 5 A (ohmsch) / 2 A (induktiv) |
| Schaltspannung | max. 24 V DC / 230 V AC |
| Schaltzyklen mech. (min.) | 2 x 10 7 |
| Schaltzyklen elek. (min.) | 3 x 10 5 (2 A / 30 V DC) |
| Last E-Bus | 130 mA |

| Digitale Eingänge | – |
| Ausgangsverzögerung | – |
| Signalpegel | – |
| Digitale Ausgänge | 8 |
| max. Strom | 5 A (ohmsch) / 2 A (induktiv) |
| Schaltspannung | max. 24 V DC / 24 V AC |
| Schaltzyklen mech. (min.) | 2 x 10 7 |
| Schaltzyklen elek. (min.) | 3 x 10 5 (2 A / 30 V DC) |
| Last E-Bus | 130 mA |
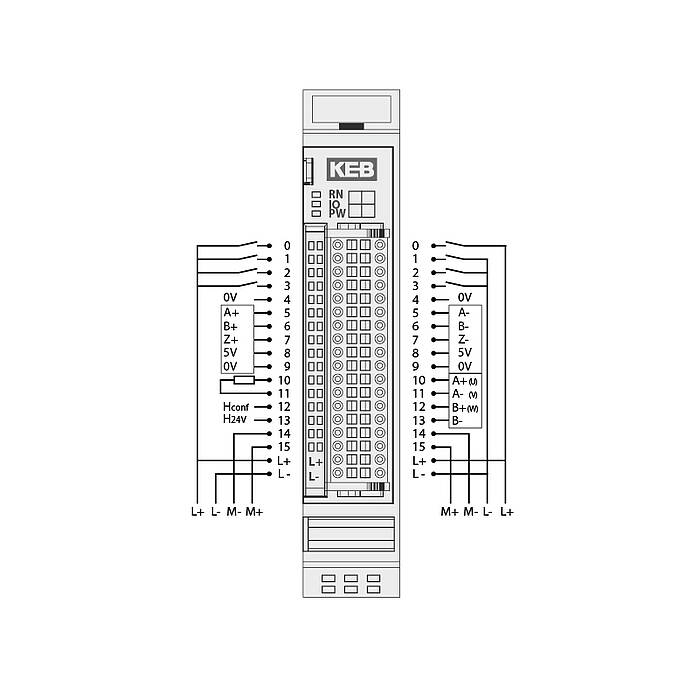
Counter / Fast Inputs
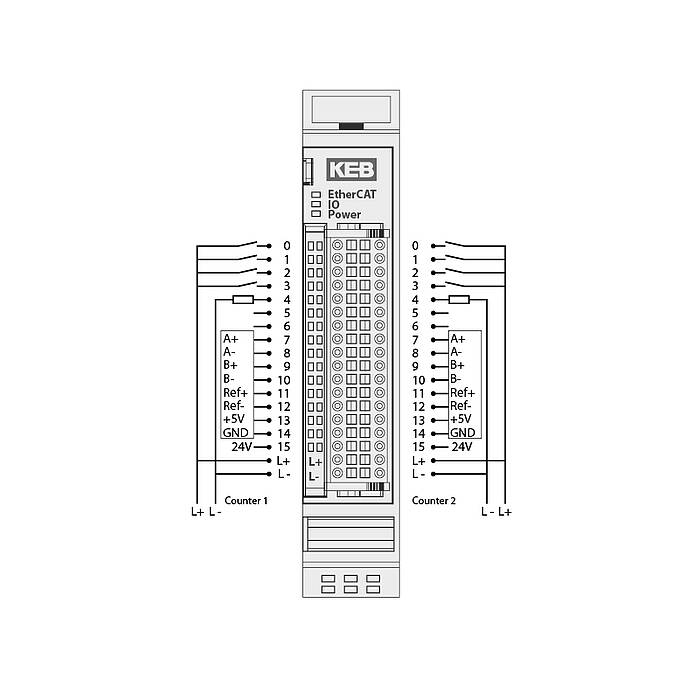
| Encoder | 2 x A, B, Ref |
| Encodertyp | 5 V (RS422) |
| Zählfrequenz | max. 200 kHz |
| Digitale Eingänge | 8 |
| Eingangsverzögerung | 1 ms |
| Signalpegel | Aus -3 … 5 V Ein 15 … 30 V |
| Digitale Ausgänge | 2 |
| max. Strom | 2 A je Ausgang |
| Analoge Ausgänge | – |
| Auflösung | – |
| E-Bus-Last | 300 mA |
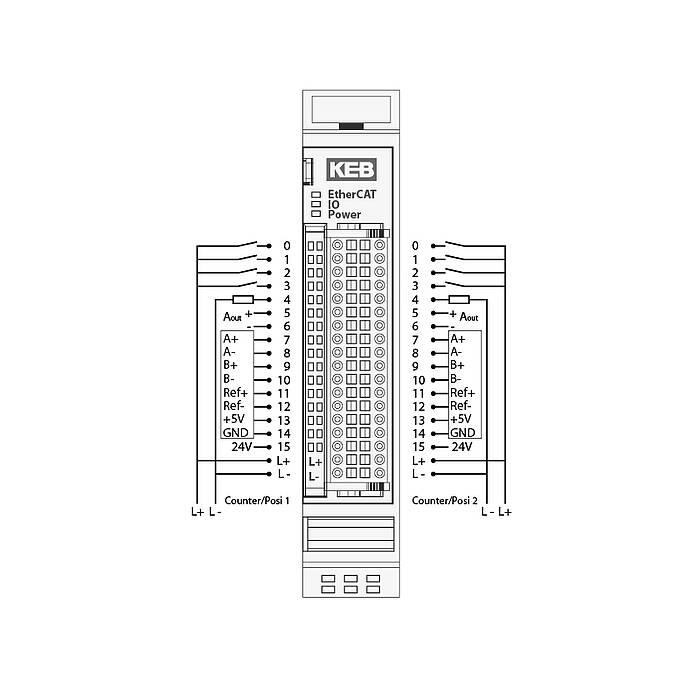
| Encoder | 2 A, B, Ref |
| Encodertyp | 5 V (RS422) |
| Zählfrequenz | max. 200 kHz |
| Digitale Eingänge | 0 … +55 °C |
| Eingangsverzögerung | -25 … +70 °C |
| Signalpegel | 5 … 95 %, ohne Betauung |
| Digitale Ausgänge | max. 3 A (ca. 20 Module) |
| max. Strom | 2 A je Ausgang |
| Analoge Ausgänge | 2 |
| Auflösung | 12 bit |
| E-Bus-Last | 300 mA |
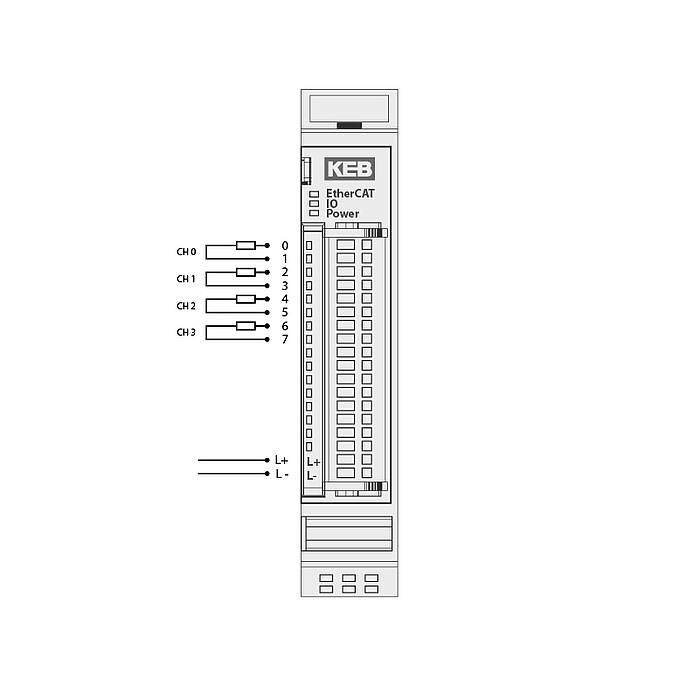
Analoge Ein-/Ausgänge
| Analoge Eingänge | 4 |
| Auflösung | 12 Bit (5,2 μA) |
| Messbereich | 0 … 20 mA, 4 … 20 mA (Endwert 20 mA) |
| Wandlungszeit | 235 μs (wenn alle Kanäle aktiv sind) |
| Ausgaberate | – |
| E-Bus Last | 190 mA |
| Analoge Eingänge | 8 |
| Auflösung | 12 Bit (5,2 μA) |
| Messbereich | 0 . . . 20 mA, 4 … 20 mA (Endwert 20 mA) |
| Wandlungszeit | 290 μs (wenn alle Kanäle aktiv sind) |
| Ausgaberate | – |
| E-Bus Last | 190 mA |
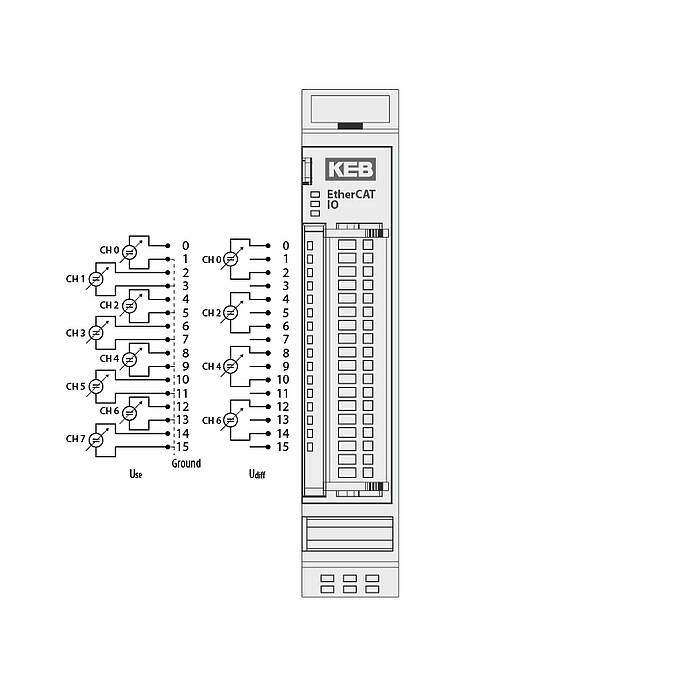
| Analoge Eingänge | 8 single ended bzw. 4 differentiell |
| Auflösung | 13 Bit (1,221 μV unipolar/ 2,422 μV bipolar) |
| Messbereich | 0 … 10 V, ±10 V |
| Wandlungszeit | 464 μs (wenn alle Kanäle aktiv sind) |
| Ausgaberate | – |
| E-Bus Last | 190 mA |
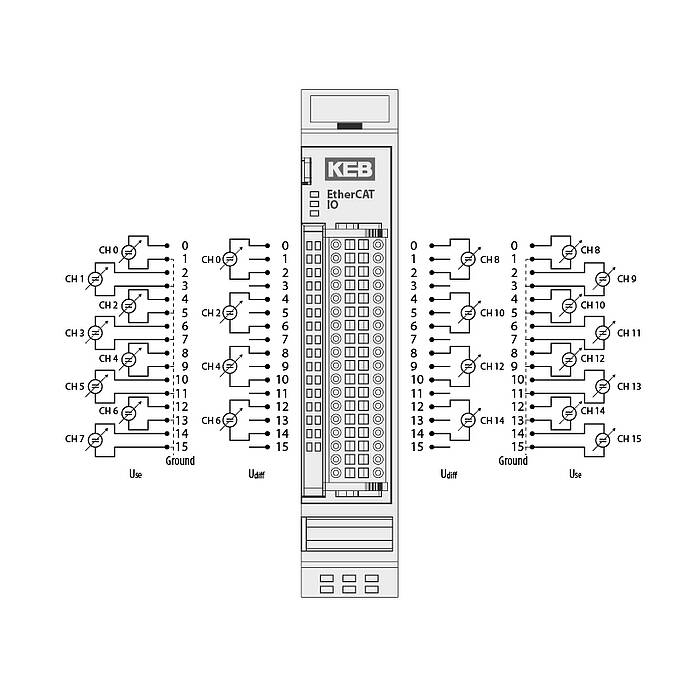
| Analoge Eingänge | 6 single ended bzw. 8 differentiell |
| Auflösung | 13 Bit (1,221 μV unipolar/ 2,422 μV bipolar) |
| Messbereich | 0 … 10 V, ±10 V |
| Wandlungszeit | 580 μs (wenn alle Kanäle aktiv sind) |
| Ausgaberate | – |
| E-Bus Last | 190 mA |
| Analoge Ausgänge | 4 |
| Auflösung | 16 Bit |
| Messbereich | 0 … 10 V, ±10 V, 0 … 20 mA |
| Ausgaberate | 220 ms |
| E-Bus Last | 150 mA |
| Analoge Ausgänge | 4 |
| Auflösung | 16 Bit |
| Wandlungszeit | 50 ms (einstellbar) |
| E-Bus-Last | 170 mA |
Thermoelement
| Sensortypen | J, K, mV (internal) |
| Kaltstellenkompensation. | ja |
| Messbereich Typ K | -200 °C … +1372 °C |
| Messbereich Typ J | -50 °C … +760 °C |
| Messbereich mV | -40 … +65 mV |
Pt100 / Ni100
| Messbereich Pt | -75 °C … +670 °C |
| Messbereich Ni | -60 °Cv+250 °C |
| Eingangswiderstand | 70 … 320 Ω |
| Messstrom | 1 mA (typisch) |
Pt1000 / Ni1000
| Messbereich Pt | -75 °C … +670 °C |
| Messbereich Ni | -60 °C … +250 °C |
| Eingangswiderstand | 700 … 3200 Ω |
| Messstrom | 0,1 mA (typisch) |
| Analoge Ausgänge | 8 |
| Auflösung | 16 Bit |
| Wandlungszeit | 50 ms (einstellbar) |
| E-Bus-Last | 170 mA |
Thermoelement
| Sensortypen | J, K, mV (internal) |
| Kaltstellenkompensation. | ja |
| Messbereich Typ K | -200 °C … +1372 °C |
| Messbereich Typ J | -50 °C … +760 °C |
| Messbereich mV | -40 … +65 mV |
Pt100 / Ni100
| Messbereich Pt | -75 °C … +670 °C |
| Messbereich Ni | -60 °C … +250 °C |
| Eingangswiderstand | 70 … 320 Ω |
| Messstrom | 1 mA (typisch) |
Pt1000 / Ni1000
| Messbereich Pt | -75 °C … +670 °C |
| Messbereich Ni | -60 °C … +250 °C |
| Eingangswiderstand | 700 … 3200 Ω |
| Messstrom | 0,1 mA (typisch) |
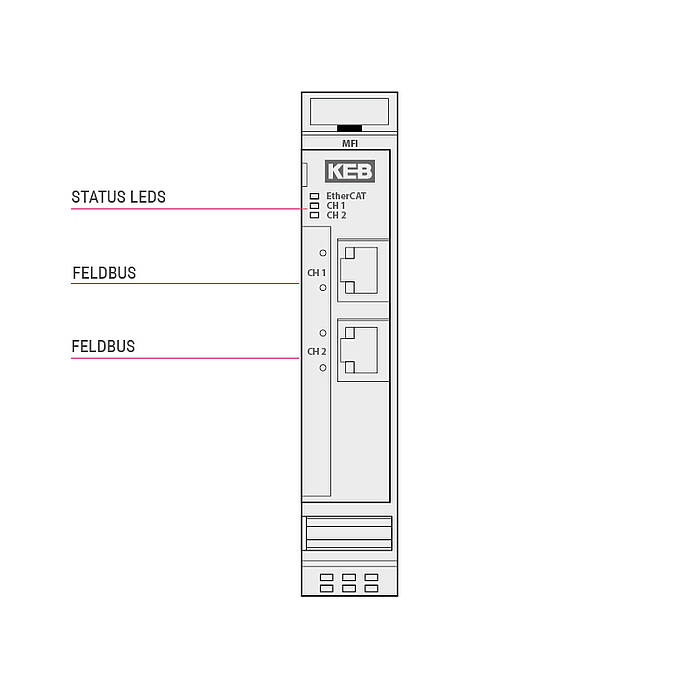
Feldbus-Erweiterung
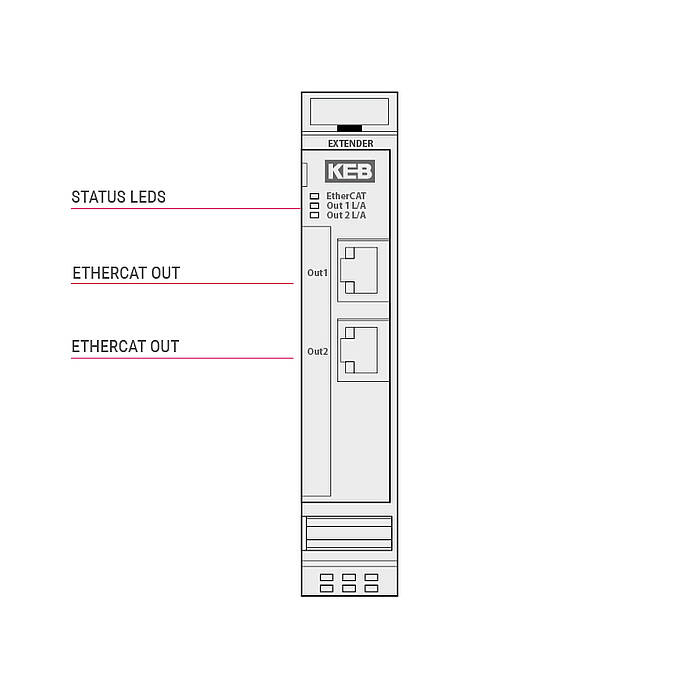
| Feldbusoptionen | 2x EtherCAT 100 Mbits/s |
| Spannungsversorgung | über E-Bus |
| Last E-Bus | 160 mA für OUT1 210 mA für OUT1 + OUT2 |
| Feldbusoptionen | Profinet Slave |
| Spannungsversorgung | über E-Bus |
| Last E-Bus | 240 mA |
| Prozessdaten | max. 384 Byte |
| Feldbusoptionen | EtherCAT Slave |
| Spannungsversorgung | über E-Bus |
| Last E-Bus | 240 mA |
| Prozessdaten | max. 384 Byte |
| Feldbusoptionen | Ethernet IP Slave |
| Spannungsversorgung | über E-Bus |
| Last E-Bus | 240 mA |
| Prozessdaten | max. 384 Byte |
| Feldbusoptionen | Powerlink Slave |
| Spannungsversorgung | über E-Bus |
| Last E-Bus | 240 mA |
| Prozessdaten | max. 384 Byte |
I/O Drive Controller
| Motoranschluss | 2 Phasen Schrittmotor oder bürstenloser DC Motor |
| Motorspannung | 12 V … 72 V DC / cULus: 12 V … 42 V DC |
| Motornennstrom | 5 A |
| Spitzenstrom | Schrittmotor: 10 A / bürstenloser DC Motor: 15 A |
| Inkrementalgeber | 5 V / 24 V (A, /A, B, /B, Z, /Z) |
| Hallgeber | 5 V / 24 V (H1, H2, H3) oder 3 zusätzliche nullschaltende Digitaleingänge |
| digitale Eingänge | 5 x 1 ms konfigurabel, z.B. Referenzschalter, Endschalter, Freigabe |
| digitale Ausgänge | 1 x 0,5 A (Bremsenausgang oder Standard Ausgang) |
| Ansteuerung | CIA402 |
| E-Bus-Last | 100 mA |
Mixed I/O
| Digitale Eingänge | 4 (8) |
| DI0..3 | 1 ms |
| DI4 | 0,1 ms |
| DI5..7 | 0,001 ms |
| Counter (DI5) | 500 kHz (bis 1 MHz) |
| Digitale Ausgänge | 24 |
| DO0..7: | 0,5 A |
| DO8..23: | 0,1 A |
| Analoge Eingänge 12 Bit | 4 x 0 … 10 V (auch als DI nutzbar DI0 … 3) |
| Abtastrate | 1 ms |
| RS485 | potentialgetrennt |
| Baudrate | 2,4 … 921,6 kBit/s |
| E-Bus-Last | 90 mA |
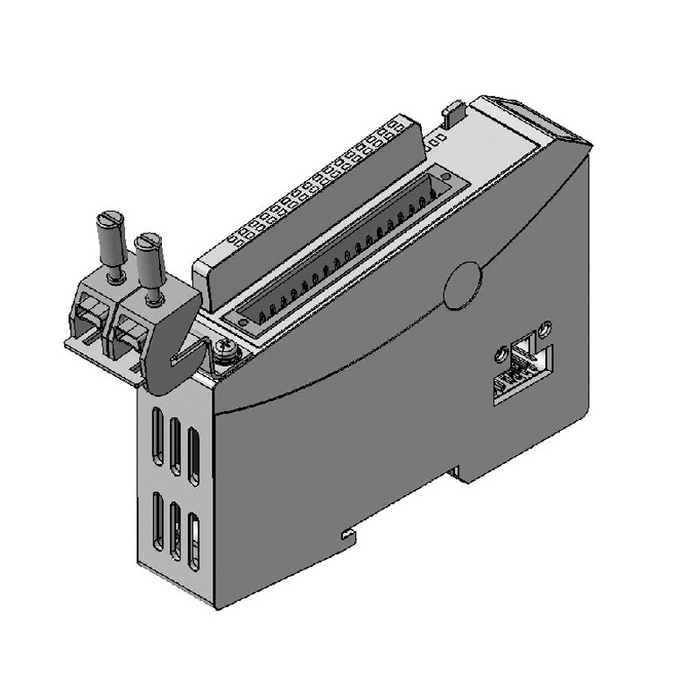
Zubehör

| Anschlüsse | 2 x 16 |
| Das Modul hat 2 voneinander getrennte Potenziallinien. | |
| E-Bus-Last | 0 mA |
KEB IO EtherCat Schirmklemme 2 x 8 mm
KEB IO EtherCat Schirmklemme 14 mm
Dokumentation
BESUCHEN SIE UNS AUF UNSEREN SOCIAL-MEDIA KANÄLEN:
BLEIBEN SIE UP-TO-DATE
Aktuelle Themen im kostenlosen Newsletter von KEB Automation